
CAV
TOC
CAV (Connected Automated Vehicles) グループでは,移動型ロボットと人間が共存,共存する社会を実現するための研究を行っています.このグループでは,現在,環境センシング,経路計画,障害物回避など様々な課題に取り組み研究を行っています.
人と協調する倉庫内配送ロボットのシミュレーション

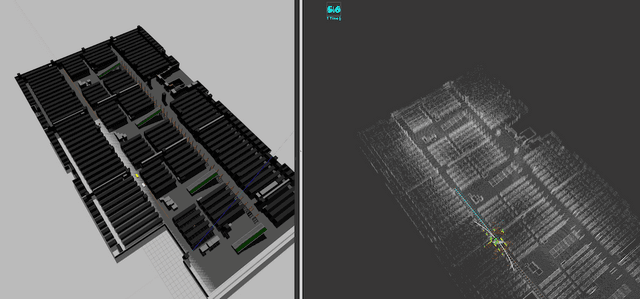
本研究ではシミュレーションを用いて,人と柔軟に協調する配送ロボットの提案,開発を行っています.オンラインショッピングなどの利用が増えて,倉庫管理の自動化が進む中,機械と人が接触する事故なども起こっています.人とロボットが頻繁に交わる環境において,ロボットは人が周りにいるという前提のもと制御を行う必要があります.配送ロボットの種類を分類し,それぞれロボットの有用性をシミュレーションを用いて検証,評価しています.また,実機の配送ロボットを用いた実証実験を複数回にわたり埼玉県内の倉庫にて実施しています.
配送ロボットを用いた人流推定
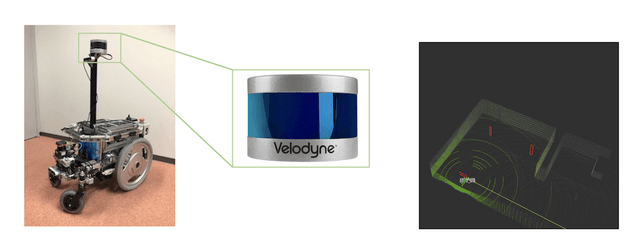
本研究では,自律移動ロボットに搭載されているLiDARを用いた,人流推定手法について検討・検証しています.自律的に配送ロボットが動くことで,現在の位置から見えない部分の人流について計測できることを目指しています.
複数配送ロボットの効率的な経路探索手法

自動運転ロボットはLiDARやカメラ,IMUなどの各種のセンサだけでなく,インフラ設備や他ロボットとの通信の利用によってより洗練された走行が期待されます.本研究では,移動する人や他の移動ロボットの邪魔をせずに自律走行するための,通信方式,経路探索アルゴリズムの研究を行っています.また,シミュレーションや実際の移動ロボットを使った実験も行っています.