
Project
TOC
国家プロジェクト
河口研究室が現在採択されている国家プロジェクトについてご紹介します。
NEDO
![]()
- 「地域活性化のためのグローカルインターバース基盤の研究開発」
- 「物流現場における人間機械協調作業のためのデジタルツイン量子最適化」
CREST
![]()
RISTEX
![]()
- 「サービス・モビリティと多形態コミュニティ社会技術研究開発」
科学研究費助成事業
![]()
- 「需要と供給に基づく高度で柔軟なサービス連携手法の構築」
- 「データ駆動型の実世界モデリングによるデジタルツイン構築手法」
- 「不整地における高度な自律走行実現のための路面認識技術」
共同研究
河口研究室が共同研究している企業をご紹介します。
エフ・シー・シー
![]()
クラフティア
![]()
トヨタシステムズ
![]()
豊田中央研究所
![]()
トヨタテクニカルディベロップメント
![]()
トラスコ中山
![]()
LINEヤフー
![]()
開発プロジェクト
河口研究室が現在開発しているプロジェクトについてご紹介します.
Synerex
![]()
Service Integration Platform for Smart Cities and Society 5.0
関連リンク
Synerex Project - GitHub
Synerex: 超スマート社会を支える需給交換プラットフォームの設計コンセプトと機能
紹介動画
その他の Synerex に関する動画は こちらのプレイリスト からご覧いただけます.
Harmoware-VIS
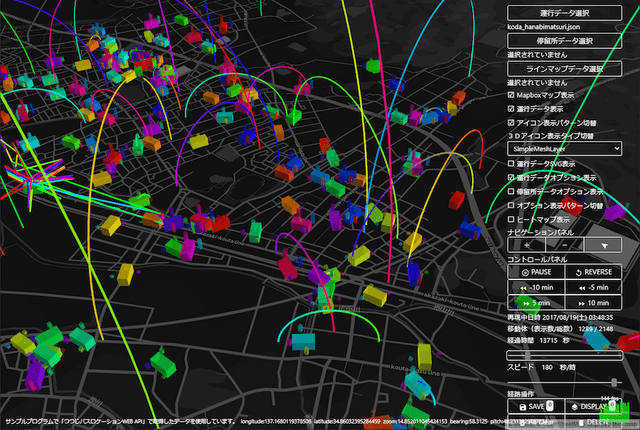
Harmoware-VISは、JST OPERA (産学共創プラットフォーム共同研究推進プログラム)の支援を受けて、HMHS (Human Machine Harmonization System; 人間機械協奏技術コンソーシアム)において開発している、データ可視化システムです。 UBERが開発した可視化フレームワークであるdeck.glをベースとしており、移動体およびその付加情報をWeb上で動的に表示する機能を備えています。 Harmoware-VISが備える可視化機能は、人や車などの移動体の表示、またそれらの経路表示、密度のヒートマップに加え地図上に3D表示される棒グラフ・2点間アーチなど多岐に渡ります。
本プロジェクトはGitHubでソースを公開しており、アップデートを行っています。
また、Typescript/Javascriptや、Gitに不慣れな方のために、アプリケーションパッケージ化したHarmoware-VIS Clientや、Pythonからデータを動的に流し込めるsynerex-harmowareパッケージも提供しています。
より詳しく知るには、以下の関連リンクやYoutube動画をご覧ください。
関連リンク
Harmoware/Harmoware-VIS - GitHub
Harmoware-VIS Documents
紹介動画
本動画では、Harmoware-VISのデモの紹介と、デモを動作させるまでのチュートリアルを行っています。
その他の Harmoware-VIS に関する動画は こちらのプレイリスト からご覧いただけます.
関連リンク
