
つくばチャレンジ2022に参加してきました
24/11/2022
こんにちは! 河口研究室M2の盛下(mol)です.
今回は、今年の11月20日に開催されたつくばチャレンジ2022に研究室のメンバーで参加してきましたのでご紹介します。



つくばチャレンジ
つくばチャレンジは2007年から毎年開催されている、つくば市内の遊歩道等の市街地で移動ロボットが自律走行する技術チャレンジです。 シミュレータ内や大学内の整備された環境とは異なる、一般の通行人や車両などが存在するリアルワールドでの自律走行技術の進歩を目的としたイベントとなっています。
自律走行のコースとしては、つくば市役所内の敷地から始まり、幹線道路の歩行者信号・研究学園駅構内・駅前公園内を巡って再度つくば市役所に戻ってくる2km強のルートとなっています。 様々な環境の中を自律走行するため完走するのは非常に難しいチャレンジとなっていますが、通常の実験環境では得られないデータや経験を得ることのできる貴重な機会となっています。
私たち河口研究室は10年ほど前に一度つくばチャレンジに参加したことがありますが、当時からメンバー・ロボットが一新されているため実質初参加で挑みました。
使用ロボット
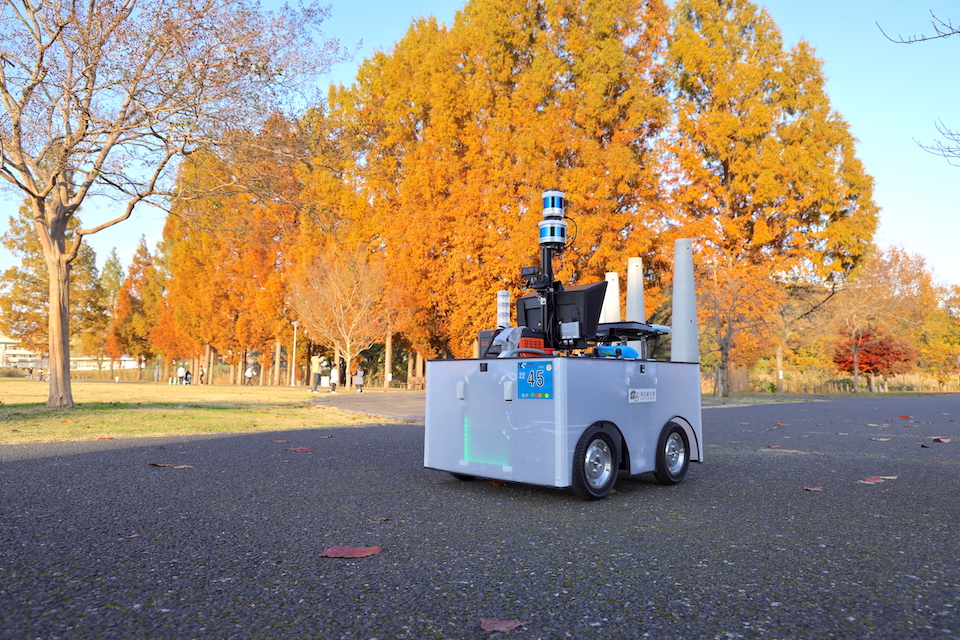
私たちはUCL-Hakobotという機体でこのチャレンジに参加しました。

こちらは私たち河口研究室の共同研究先である株式会社Hakobotから購入した機体にLiDARなどのセンサ・外装・ソフトウェアを取り付けた機体となっています。 このロボットの特徴として、4WD4WSというパワフルな機構により高い走破性能と積載能力を両立しています。 総重量としては100kgを超えており、つくばチャレンジの中でも最重量級のロボットでした。
課題内容
つくばチャレンジでは必須課題と選択課題が設定されています。
必須課題ではコースを自律走行で1周することに加え、「横断歩道前は必ず一時停止する」・「信号待ちでは所定の待機列に自律で並ばせること」など基本的な項目が設定されていました。

選択課題では「信号機を認識して横断」・「公園内で指定されたマネキンを探索」など、さらに高度な課題が設定されており、これに挑むチームも見られました。
実験走行
つくばチャレンジでは、本番前に同じコースを実験走行する機会が7月から11月にかけて合計9日間用意されており、そのうち河口研究室は7日間参加しました。
この実験走行での目的は「確認走行区間」と呼ばれる区間の突破でした。 コースの開始地点からおよそ300mがこの区間に設定されており、この区間を自律走行で突破できないとつくば市役所外での自律走行が認められません。
最初の実験走行では、自律運転ソフトウェアである「Autoware.universe」の調整不足やマシンの処理速度不足などにより、短い距離の自律走行すらままならない状態でしたが、実験走行を重ねるにつれノウハウが増えていき、最後の実験走行では無事確認走行区間を突破できました。 確認走行区間をクリアすると、ナンバープレートの右上に認定シールを貰うことができます。

確認走行区間を突破後は、駅構内や公園内で自律走行の実験を行い、本番走行に備えました。
本走行 11/20
本走行は11/20に開催されました。 今までの実験走行では晴天の元でロボットを走行させていたのですが、なんと本番当日は小雨が降るという未経験の環境での自律走行を強いられました。
ロボットも急ごしらえの雨具でセットアップさせました。

そして迎えた本走行。小雨の降る中、係員の指示と同時に自律走行を開始させました。
最初は順調な走りを見せていましたが、途中で雨具が障害物として認識されてしまい、ロボットが停止してしまいました。 公式的な記録としてはここで失敗扱いになってしまいましたが、自律走行実験の継続は認められていたため、そのまま自律走行を続けました。
コースを1周するまでに何度もトラブルがあったため断続的な自律走行にはなりましたが、最終的にはコースの70%ほどを自律走行できました。



自分たちで育て上げた(?)ロボットが自律走行するというのは何度見ても面白いな、と思いました。
関わったメンバー・スタッフの方々、およそ5ヶ月間お疲れ様でした!
今回の投稿内容についてもっと詳しく聞きたい!河口研に興味があります!という方はぜひ見学へいらっしゃって下さい.(もちろんオンラインでもOKです!)
また,河口研ではYoutubeチャンネルにいろいろな投稿をしています.
そちらも是非ご覧ください!
rikuto☆ucl.nuee.nagoya-u.ac.jp (☆を@に変えてください)までご連絡ください!
河口研ではあなたが来るのを楽しみに待ってます!