
ロボットをモニタリングしつつリモコン操縦もしたい!
2024/12/25
こんにちは. 河口研究室助教の浦野(vrano)です.
河口研究室では小型の移動ロボットを複数保有しており,歩行空間で自律走行させつつデータ収集・配送・ナビゲーションなどに利用できないかと研究を行っています.
(2022年・2023年のつくばチャレンジにも参加しました.ブログやYoutube動画も出ています!)
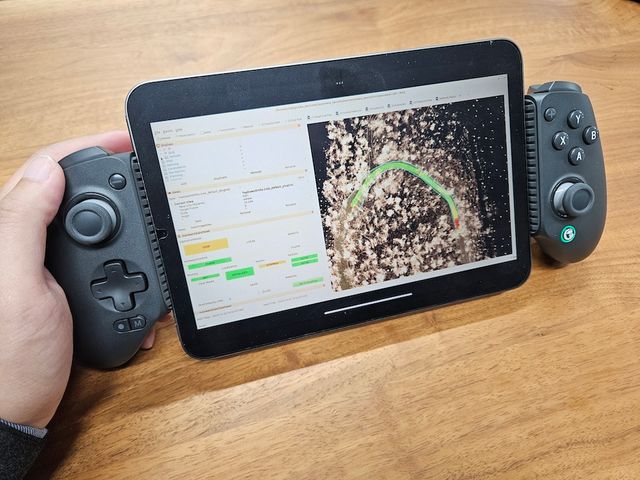
自律走行にはAutoware.universeを使っていますが,ロボット上にPCを載せているため,自律走行中に画面を見たくてもなかなか見られません. 両手はコントローラを握るのに使ってしまっているし……ということでPlayStation Portalリモートプレーヤーみたいな感じの,画面とコントローラがくっついたデバイスを探し求めて色々検討したところ,こんな感じのものができました.

モノとしては,以下から成っています.
- PC: ここでは一般的なノートPC
- Hollyland Mars 400S Pro: ワイヤレスHDMIトランスミッタ(の送信機)
- GAMESiR G8+: スマホ類を挟む無線コントローラ
- iPad mini: ただのiPad mini
で,こんな感じで繋がっています.
PC─Mars……(Wi-Fi)……iPad
└─……………(Bluetooth)……G8+Hollyland Mars 400S Proは通常,専用の送受信機セットで使うものですが,Wi-Fi機能も有しており,専用アプリを使うとスマホやタブレットで映像を見られます. また,G8+はiPadに接続するのではなく,PCに接続しています.
このようにすると,↓のような感じでrvizを見つつリモコン操作も行えてたいへん便利かも!というブログでした.
なお,電波の飛ぶ距離は試していないのですが,数メートル離れて見守る程度なら全然問題無いですね.
ちなみにMars 400S Proは複数の電源供給手段があり,NP-Fバッテリ,AC電源アダプタ,USB-Cが利用できます. PCからUSBケーブルで電源を供給してしまうのが楽かと思います.
G8+はXboxモードやDualShock4モードなどがありますが,少なくともDualShock4モードはUbuntu上で正常に動作する(jstest-gtkで動作確認でき,ROS2のjoyパッケージで入力を取れる)ことを確認しています.
ボタンアサインはDualShock4モードではDualShock4およびDualsenseと同一でした.
モニタリング用に使うスマートデバイスですが,G8+ではiPad miniより大きなタブレットは幅が足りないので使えません. 大抵のスマートフォンは問題無く挟まるのでスマートフォンでもよいですが,大画面で見やすいという意味でiPad miniがベストそうです.
映像の遅延を確認する用に動画を撮ってみました.
他の研究室ではロボットのモニタリングはどうしてらっしゃるのでしょうか. ベストプラクティスがあれば,ぜひうかがいたいところです…….